
El dispositivo cubrió una distancia de 215 metros sobre la superficie marciana antes de aterrizar a unos cinco metros del lugar previsto.

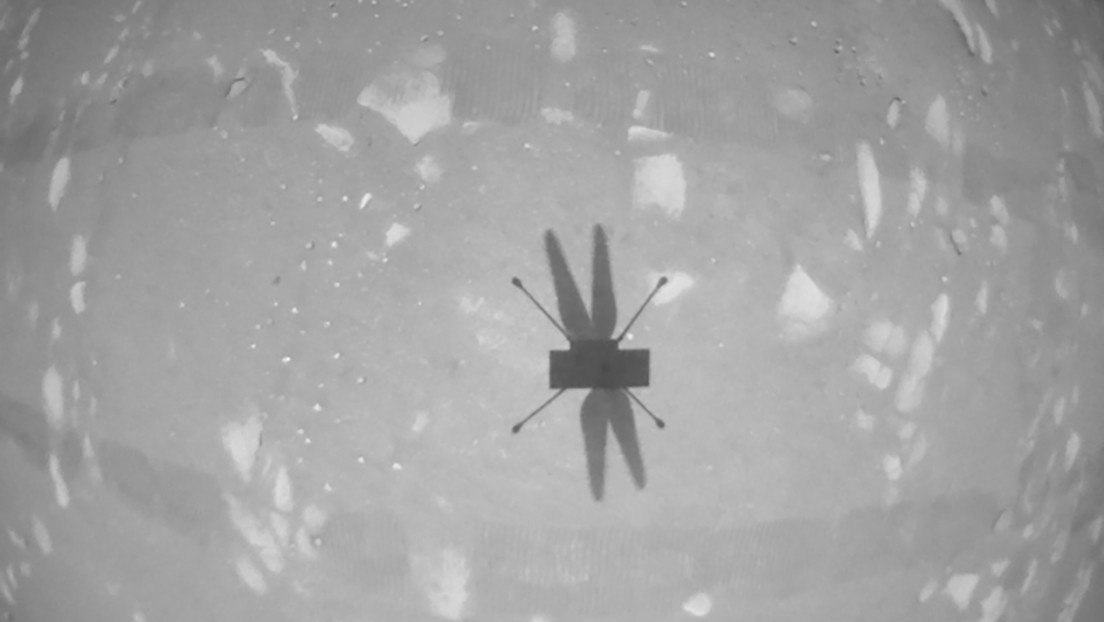
El helicóptero Ingenuity de la NASA sobrevoló por sexta vez la superficie de Marte el pasado 22 de mayo, informó este jueves la agencia espacial estadounidense en una nota publicada en su página web titulada ‘Sobrevivir a una anomalía en pleno vuelo: ¿Qué ocurrió en el sexto vuelo de Ingenuity?’.
Aunque la aeronave logró completar las tareas establecidas, la misión estuvo marcada por desviaciones de la ruta planeada, así como por cambios de velocidad e inclinaciones que experimentó el helicóptero. El dispositivo cubrió una distancia de 215 metros sobre la superficie marciana antes de aterrizar a unos cinco metros del lugar previsto.

Según el plan del vuelo, el Ingenuity tenía que ascender diez metros y desplazarse unos 150 metros en dirección suroeste a una velocidad de cuatro metros por segundo. A continuación, tenía programado trasladarse 15 metros hacia el sur, tomando imágenes estereoscópicas del terreno y avanzar otros 50 metros hacia el noreste para aterrizar allí. Sin embargo, el plan se salió de los márgenes establecidos.
Los datos telemétricos mostraron que la primera etapa de 150 metros se completó sin problemas, aunque en adelante se registraron altibajos de velocidad del dispositivo, lo que condujo a su oscilación, que perduró el resto del vuelo. Antes de descender con seguridad sobre la superficie marciana, los sensores a bordo indicaron que las desviaciones de balanceo y cabeceo del helicóptero eran de más de 20 grados. Todo ello vino acompañado con saltos del consumo de energía.
¿En qué consiste el fallo?
Los especialistas establecieron que la disfunción se derivó de un problema del procesamiento de imágenes. Es decir, se produjo un fallo en la cadena de imágenes proporcionada por la cámara de navegación del aparato unos 54 segundos después de su despegue.
“Este mal funcionamiento hizo que todas las imágenes de navegación posteriores se entregaran con marcas de tiempo inexactas. A partir de aquel momento, cada vez que el algoritmo de navegación realizaba una corrección basada en una imagen de navegación, operaba sobre la base de información incorrecta acerca de cuándo se había tomado la imagen. Las inconsistencias resultantes degradaron significativamente la información utilizada para volar el helicóptero”, precisaron en la NASA.

